
Currently a researcher in Shanghai Qizhi Institution. My research interest mainly focus on 3D computer vision, AIGC, LLM. Aiming to percept and reconstruct the world in virtual reality for embodied intelligence.
💬 Professional Experience
- 2024.10 - Present, Shanghai Qizhi Institution, Shanghai. Advisor: Prof. Li Yi. Topic: 4D Scene Reconstruction.
- 2022.10 - 2024.10, Huawei, Beijing / Hangzhou. Topic: Text-to-Image generation, dataset construction and training for LLM application in vertical domain (Translation, AIops, AI agent), Software Development.
📖 Educations
- 2020.09 - 2022.05, Master of Science, Columbia University, New York. GPA: 4.198/4.3. Topic: Robotics and Control.
- 2016.09 - 2020.06, Bachelor of Engineering, Naning Univerisity of Science and Technology, Nanjing.
📝 Publications
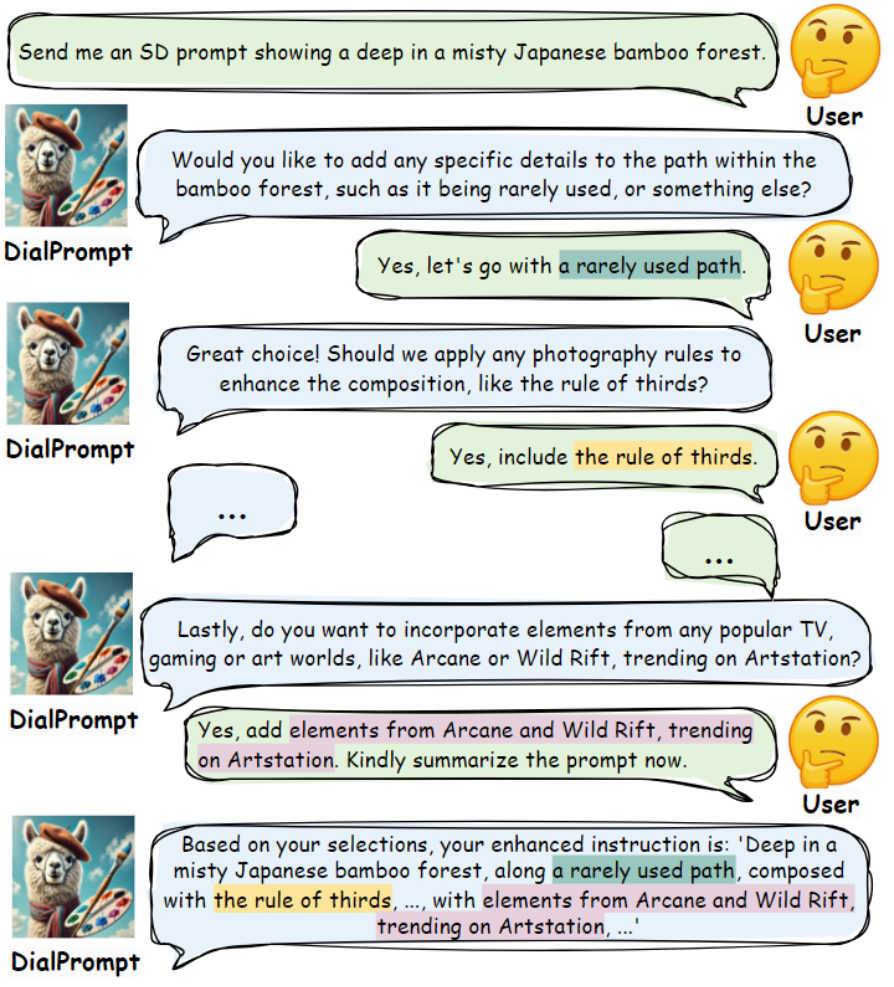
What Do You Want? User-centric Prompt Generation for Text-to-image Synthesis via Multi-turn Guidance
Yilun Liu, Minggui He, Feiyu Yao (corresponding author), Yuhe Ji, Shimin Tao, Jingzhou Du, Duan Li, Jian Gao, Li Zhang, Hao Yang, Boxing Chen, Osamu Yoshie
in submission
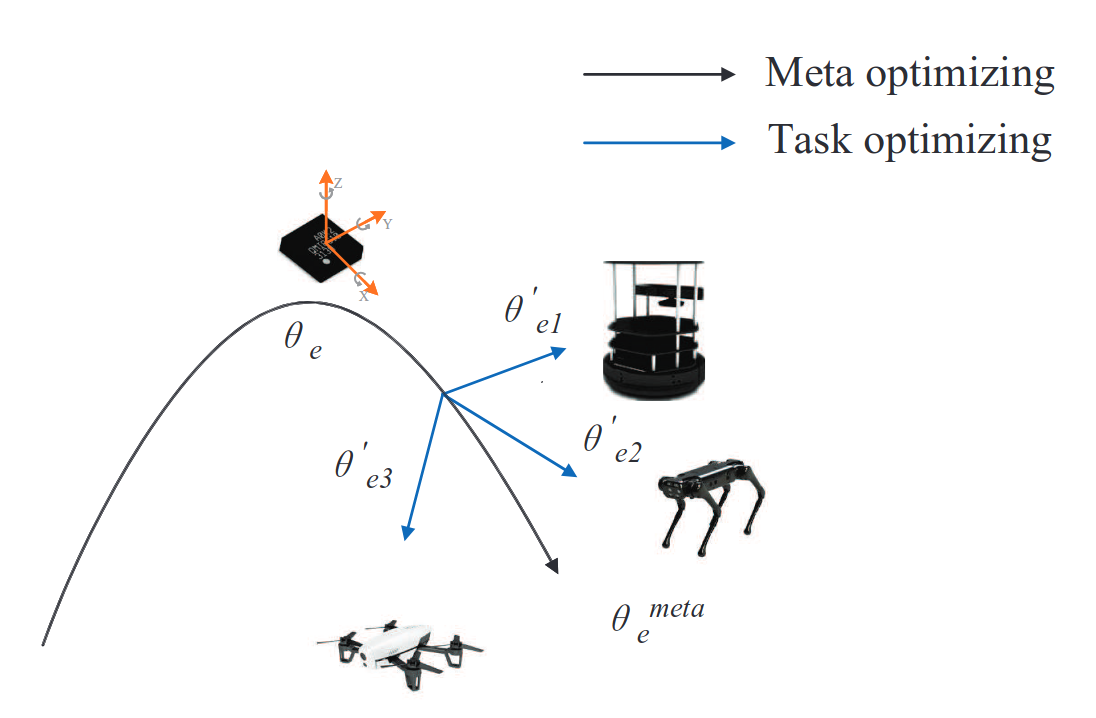
Few-shot Domain Adaptation for IMU Denoising
Feiyu Yao, Zongkai Wu, Zhenyu Wei, Donglin Wang
in Arxiv,
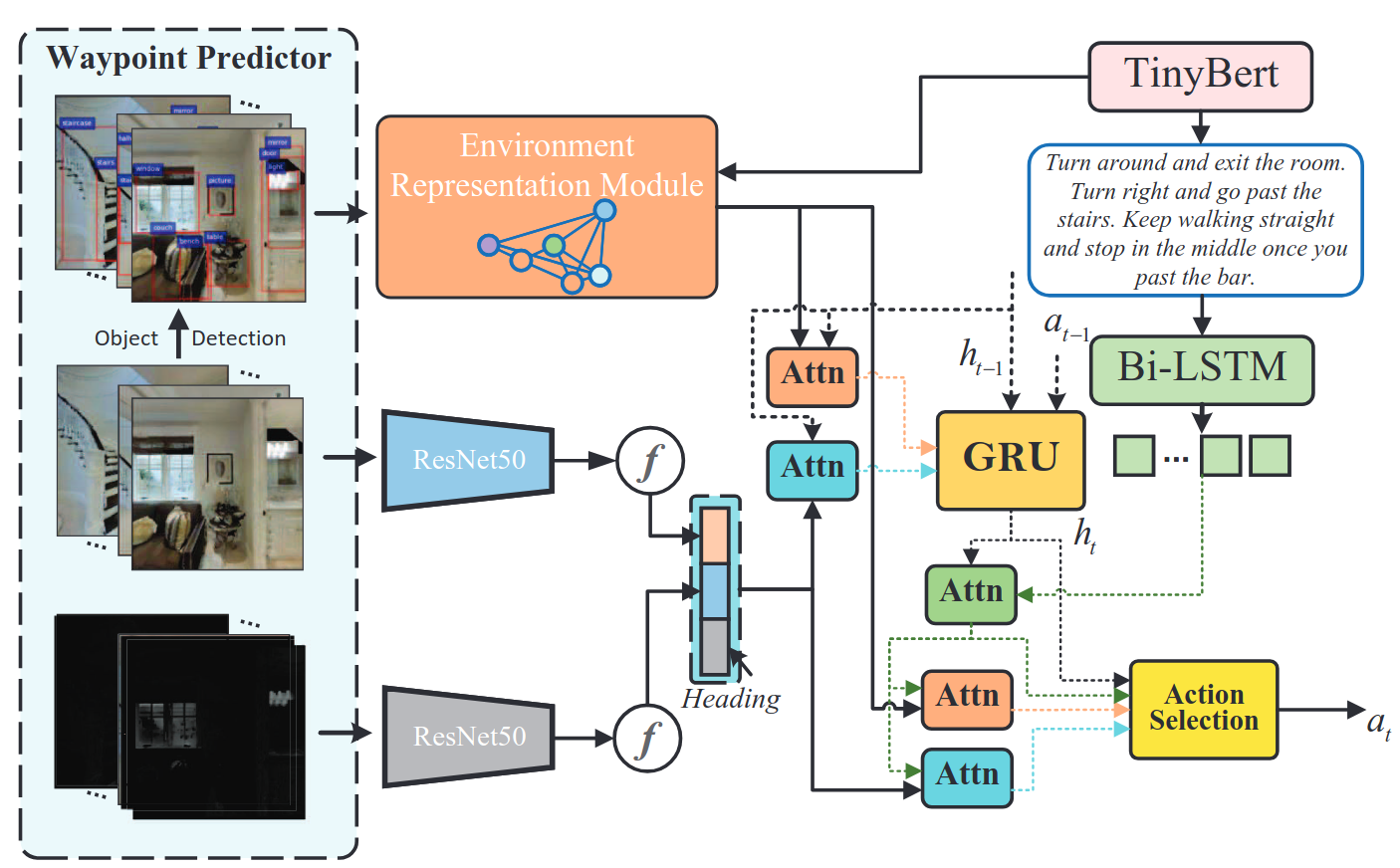
Graph based Environment Representation for Vision-and-Language Navigation in Continuous Environments
Ting Wang, Zongkai Wu, Feiyu Yao, Donglin Wang
ICASSP 2024
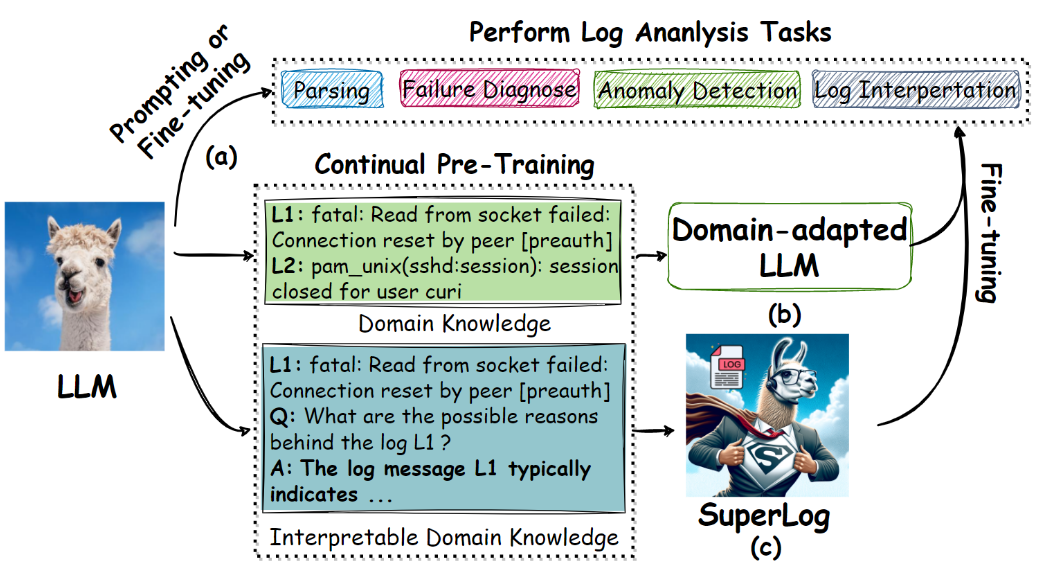
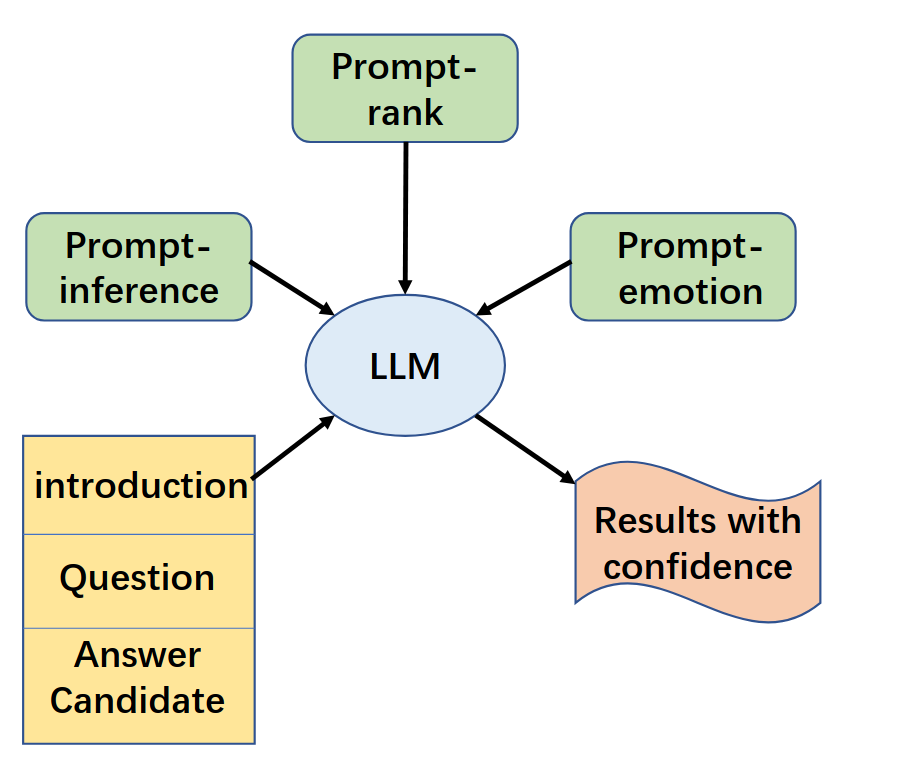
Adapting Large Language Models to Log Analysis with Interpretable Domain Knowledge
Yuhe Ji, Yilun Liu, Feiyu Yao, Minggui He, Shimin Tao, Xiaofeng Zhao, Su Chang, Xinhua Yang, Weibin Meng, Yuming Xie, Boxing Chen, Hao Yang
in submission
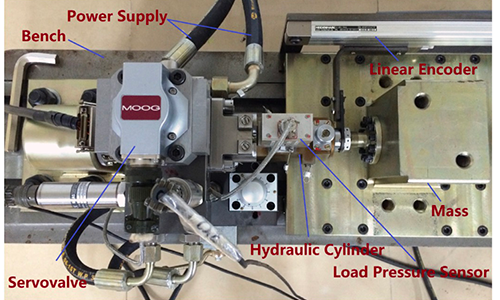
Model reference adaptive tracking control for hydraulic servo systems with nonlinear neural-networks
Zhikai Yao, Jianyong Yao, Feiyu Yao, Qiang Xu, Minrui Xu and Wenxiang Deng
ISA Transactions
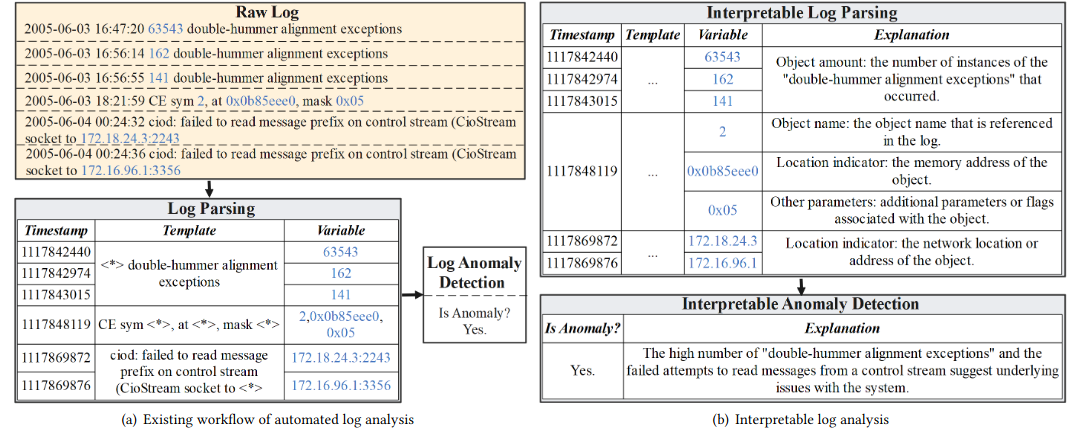
LogPrompt: Prompt Engineering Towards Zero-Shot and Interpretable Log Analysis
Yilun Liu, Shimin Tao, Weibin Meng, Feiyu Yao, Xiaofeng Zhao, Hao Yang
ICSE 2024
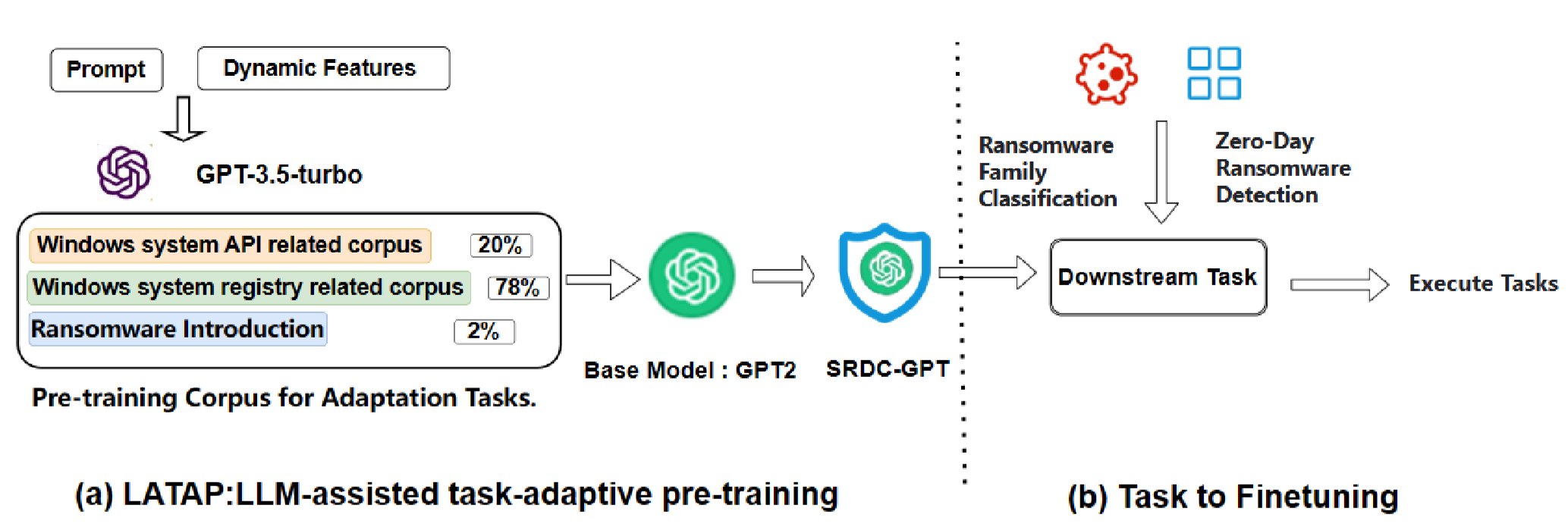
SRDC: Semantics-based Ransomware Detection and Classification with LLM-assisted Pre-training
Ce Zhou, Yilun Liu, Weibin Meng, shimin tao, Weinan Tian, Feiyu Yao, Xiaochun Li, Tao Han, Boxing Chen, Hao Yang
AAAI 2025
Enhancing inference capabilities of llms with knowledge graphs
Wei Tang, Xiaosong Qiao, Xiaofeng Zhao, Min Zhang, Chang Su, Yuang Li, Yinglu Li, Yilun Liu, Feiyu Yao, Shimin Tao, Hao Yang, He Xianghui
ACL 2024 Workshop
🎖 Honors and Awards
- International Level:
Honorable Mention in Mathematical Contest in Modeling (2018.04).
Silver Award of the 7th China International “Internet plus” College Students Innovation and Entrepreneurship Competition — Intelligent Fusion Control Algorithm Chip.
- National Level:
Scholarship, 2017 Ministry of Industry and Information Technology of The P.R.C. Innovation and Entrepreneurship Scholarship (2018.05).
Scholarship, 2017 Ministry of Industry and Information Technology of The P.R.C. Innovation and Entrepreneurship Scholarship (2019.05).
Third prize in National Cipher Technology Competition (2018.11).
- Provincial Level:
Second prize in Jiangsu Province 14th College Students’ Physics and Experimental Technology Works Innovation Competition (2017.11).
The first prize of Physics Olympique of Middle School students in Jiangsu Province in 2015 (2015.10).
- Municipal Level:
Excellent Intern in Summer Internship for College Students (2018.12).
- School Level:
Scholarship for People of the Year on Campus in academic year 2018-2019 (Only 10 in NUST) (2019.11).
Outstanding Graduate Representative (2020.06).
💻 Course Project Gallery
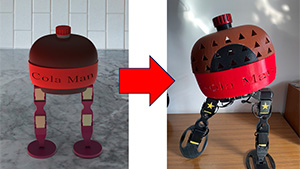


• Brainstormed appearance of organic-looking two-legged robot, and designed the CAD model of all components.
• Fabricated each component of robot using 3D printing and assembled components with the Raspberry Pi, motors, controller board, etc., as entire robot.
• Achieved 1st in of robot speed competition.
• Robot dance show is online: https://www.youtube.com/watch?v=g9lacYcaEdc.
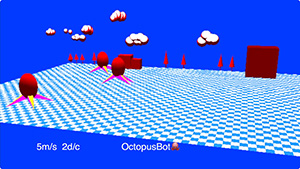
Soft Robot with Genetic Algorithm
• Built virtual physics engine and 3D environment with C++ and OpenGL to simulate the real-world that satisfies the laws of physics.
• Treated each soft robot as a parent genotype and iteratively utilized the selection, mutation, and crossover mechanism to evolve the internal state of soft robots to improve the speed of hopping gait.
• Designed multiple criteria (speed, age, mass center and support plan) and optimized robot population referring to pareto front.
• Best soft robot performance demo: https://www.youtube.com/watch?v=Rx6Fo3JLdqw
Object Detection in Haze
• Combined dehazing network (AECR-NET) and object detection network (YOLO v5) with data augmentation strategy such as rotation, resizing and fine-tuning components on different datasets.
• Won 1st in Class
Object Detection in Haze
• Developed an algorithm for referring video object segmentation task, which aimed to do object segmentation for each frame in video.
• Established causal inference analysis for existing methods and located failure cases on unbalanced object category. distribution in dataset. Applied contrastive learning to reduce image features with no causal relevance.
• The model can get better performance on fine-grained picture with less training time.
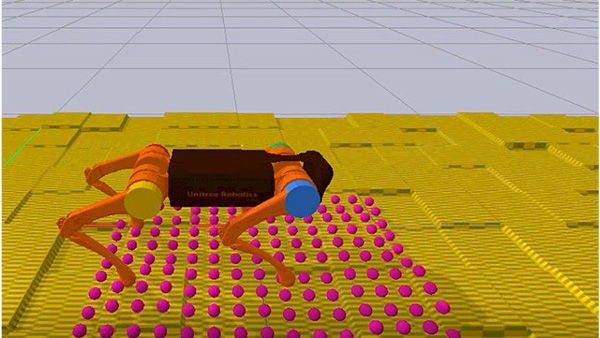
Reinforcement Learning in Quadruped Robots
• Controlled quadruped robot to search for specific object.
• Implemented a hierarchical control strategy for quadruped robots, with Soft Actor-Critic reinforcement learning method as upper controller and Optimal Control as lower controller.
• Introduced a SLAM sensor for body control and object detection.
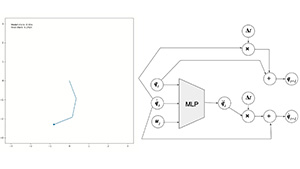
Dynamic Torque Control of Multi-link Robotic Arms
• Controlled the state (i.e., velocity, angle, and torque) of multi-link robotic arms to achieve specific positions in OpenAI Gym.
• Approximated forward dynamic model with multilayer perceptron, trained on the data generated by physical analog. The Robotic arm’s performance will be similar to physical analog only when data is sufficient and target position is not far from initial position).
• Compared performance of traditional control method (Modern Predictive Control) with Reinforcement Learning methods (Deep Q-Network and Proximal Policy Optimization).
🪐 Service
Being the reviewer of ACM Multimedia (ACM MM) conference, IEEE Transactions on Circuits and Systems for Video Technology (IEEE TCSVT) Journal and The International Joint Conference on Neural Networks (IJCNN) conference.
Served as Teaching Assistant in EE6601 in Columbia University.